一、概论
1.1 基本概念
查找(searching)就是根据给定的某个值,在查找表中确定一个其关键字等于给定制的数据元素(或记录)。
查找表(search table)是由同一类型的数据元素(或记录)构成的组合。例如下图:
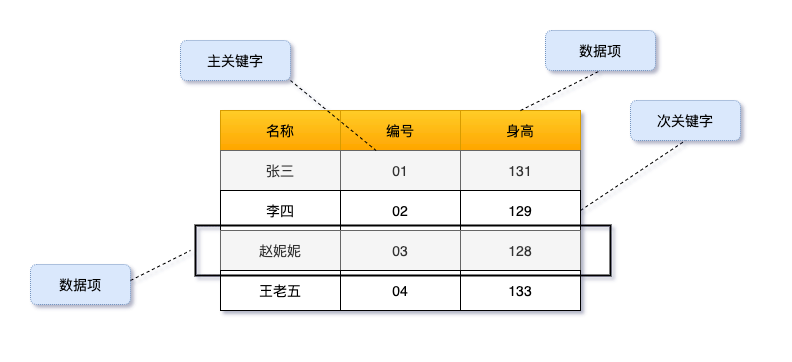
关键字(key)三数据元素中某个数据项的值,又称为键值。用它可以标示一个记录的某个数据项,我们称为关键码。
1.2 分类
按照表查找方式来分有辆大众:静态查找表和动态查找表。
静态查找表(Static Search Table): 只做查找操作的查找表,主要操作有:
- 查询某个“特定的”数据元素是否在查找表中
- 检索某个“特点的“数据元素和各种属性
动态查找表(Dynamic Search Table):在查找的过程中同时插入查找表中不存在的数据元素,或者从查找表中删除已经存在的某个数据元素。动态查找表的操作是两个:
- 查找时插入数据元素
- 查找时删除数据元素
二、静态查找
2.1 顺序查找
顺序查找(Sequential Search)又叫线性查找,是最基本的查找技术,他的查找过程是:从表的第一个(或最后一个)记录开始,逐个进行记录的关键字和给定值比较,
- 若某个记录的关键字和给定值相等,则查找成功,找到所查的记录;
- 如果直到最后一个(或第一个)记录,其关键字和给定值比较都不等时,则表中没有所查的记录,查找不成功。
2.3.1 顺序查找算法
算法比较简单,在数组里遍历查找:
int Sequential_Search(int *a, int n, int key) |
2.3.2 顺序查找优化
由于上述算法,每次都需要判断i是否越界,稍显复杂,我们对算法进行改进,在0位加入一个哨兵,可以减少一次让 i 与 n 比较,具体如下:
int Sequential_Search(int *a, int n, int key) |
这里改动了3个步骤
- 在0 位设置称为key,称为哨兵
- 循环倒置。从尾部开始倒序循环,好处是形成了一个完整循环(包括哨兵)
- 查找结果二合一:返回>0 说明找到虚序号;=0 则 = key,表示查找失败
2.4 折半查找
折半查找(Binary Search),又称为二分查找。
前提是线性表中的记录必须是关键码有序(通常从小到大有序),线性表必须采用顺序存储。
折半查找的基本思想:
- 在有序表中,去中间记录作为比较对象,若给定值与中间记录的关键字相等,则查找成功;
- 若给定值小于中间记录的关键字,则在中间记录作伴去继续查找;
- 若给定值大于中间记录的关键字中,则在中间记录的右半区继续查找。
不断重复上述过程直到查找成功,或所有查找区域无记录,查找失败位置。
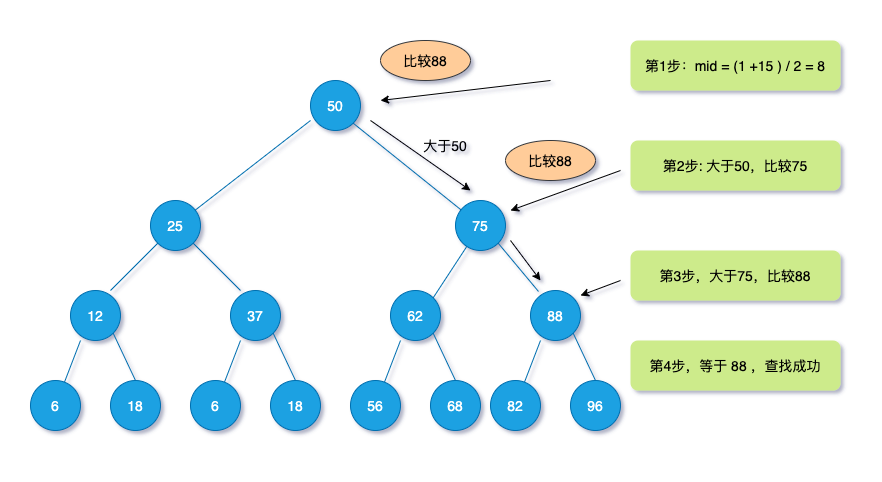
举例:现在有个数组 $<!–swig20–>$,查找其中 $88$ 的序号
代码实现如下:
// 折半查找 |
查找流程如下图:
2.3 插值查找
2.3.1 折半改进
由于折半查找会从中间开始查找,一旦超过一定量级,查找任务还是比较繁重。所以考虑是否还有改进空间
查找代码中求 mid的计算公式可以改进为:
$$
mid = \frac{low+high}{2} = low + \frac{1}{2} (high - low)
$$
也就是 mid等于最下标 low 加上 最高下标 high 与low 的差值的一半。
考虑将这个一半改进为以下方案:
$$
mid = low + \frac{ key - a [low]}{ a[high] - a[low]}(high - low)
$$
改进的好处:可以大大减少查找的次数。
比如数组 {6,12,18,25,31,37,43,50,56,62,68,75,82,88,96},查找18 ,按照折半查找需要查找4步才可以找到
使用新公示,需要 $\frac{ key - a [low]}{a[high] - a[low]}$ = $ \frac{(18 - 12)}{(96 - 12)} \approx 0.071$,那么此时 $mid\approx 1 + 0.071\times (15-1) = 1.994$,取整后,只需要查询2次即可,大大提升了效率。
这样的到了另一种有虚表查找算法,插值查找法。
2.3.2 核心概念
插值查找法(Interpolation Search) 是根据要查找的关键字key 与查找表中最大最小记录的关键字比较后的查找方法,其核心就在于插值公示:
$$
\frac{key - a[low]}{a[high] - a[low]}
$$
缺点:不适合数字差距不均匀的数组。如 {0, 1, 2, 1000, 30000}
2.3.2 算法实现
由上可知,只需要改进一行代码
// 插值查找 |
2.5 斐波那契查找
斐波那契查找(Fibonacci Search),利用了黄金分割来实现。
查找的流程,先举例实现吧,假设给定一个数组 $a[10] = $ {0, 1, 16, 24, 35, 47, 59, 62,73, 88, 99}, 此时$n = 10$,需要查找的键为 $key = 99$
先定义一个斐波那契数列
F[n]下标 0 1 2 3 4 5 6 7 8 9 F 0 1 1 2 3 5 8 13 21 34 它原理之前有学习过,实现原理是递归原理,代码实现如下:
F[0] = 0;
F[1] = 1;
for (int i = 2; i < 100; i++) {
F[i] = F[i -1] + F[i - 2];
}定义变量和下表
int low, high, mid, i, k;
low = 1, high = n;其中
low、high分别为数组最低下标,默认 high为最大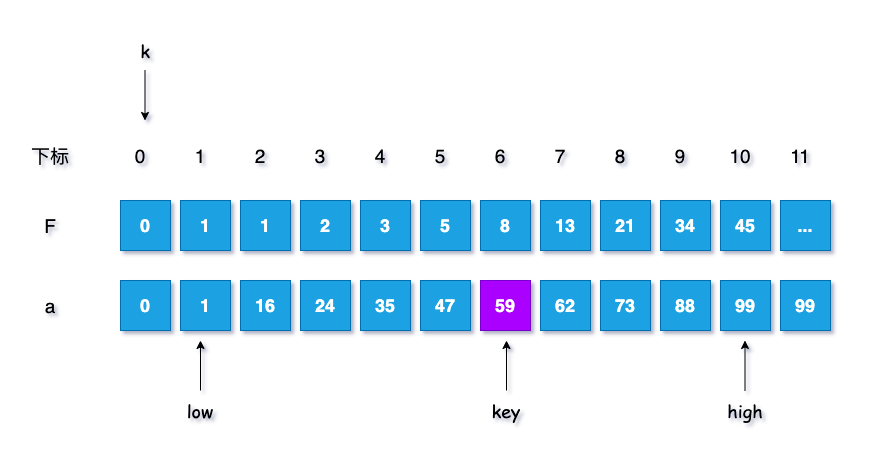
计算 n 位于斐波那契数列的位置
while (n > F[k]) -1
k++;由于上文给出的数组长度$n = 10$,得出 $F[6] < n < F[7]$, 所以此时 $k = 7$,在队列中如图示
将不满的数值补全,用
a[n],为什么补齐?for (i = n; i < F[k] - 1; i++) {
a[i] = a[n];
}开始查找:
设定初始条件 $low <= high$,假设查找 n = 10,需要查找key = 59
计算当前分割下标,$mid = low + F[k - 1] -1$, 此时$mid = 1 + F[7-1] -1 =8$
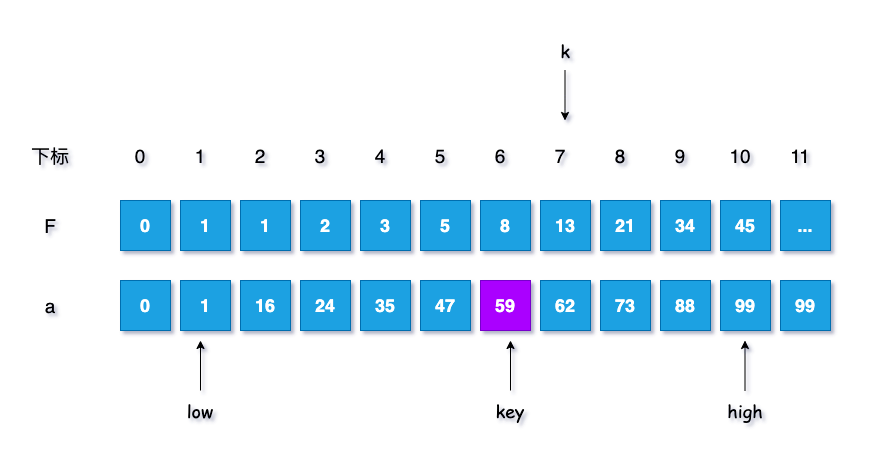
判断,若 $key < a[mid]$ ,即如果查找记录小于当前分割记录
最高下标调整到分隔下标的 $mid -1$ 处
high = mid -1;
斐波那契数列下标减$1$位
k--;
这一步中 key 为59, a[mid] 及a[8] 为73,所以$key<a[mid]$,需要进行调整, 如下图所示
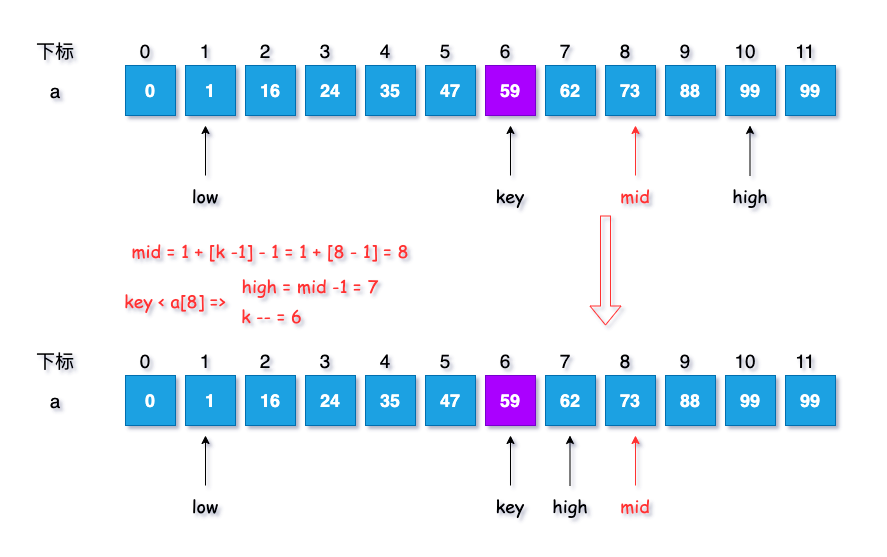
此时各项参数结果为:$k = 6, low = 1, mid = 8, high = 7$
继续循环查找。
- 计算当前分隔的下标:$mid = F[6-1] - 1 = 5$ 。
- 继续判断 key 与 a[mid],此时 $a[5] = 47 < key$,
- 执行两个步骤:
最低下标调整到分割下标 $mid + 1$ 处
low = mid + 1;
斐波那契数列下标减2位
k = k - 2;
实现示意图如下:
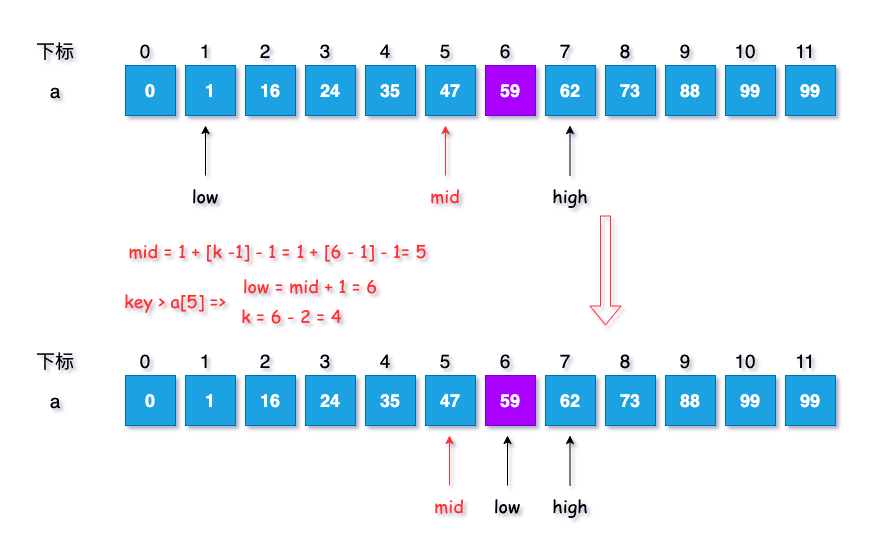
此时各项参数结果为:$k = 4, low = 6, mid = 5, high = 7$
再次循环。
- 计算当前分隔的下标:$mid = 6 + F[4-1] -1 = 7$。
- 继续判断 key 与 a[mid] 的大小,此时 $a[7] = 62 > key$,因此执行第三步的策略。
- 重复一下如下:
最高下标调整到分隔下标的 $mid -1$ 处
high = mid -1;
斐波那契数列下标减$1$位
k--
实现示意图如下:
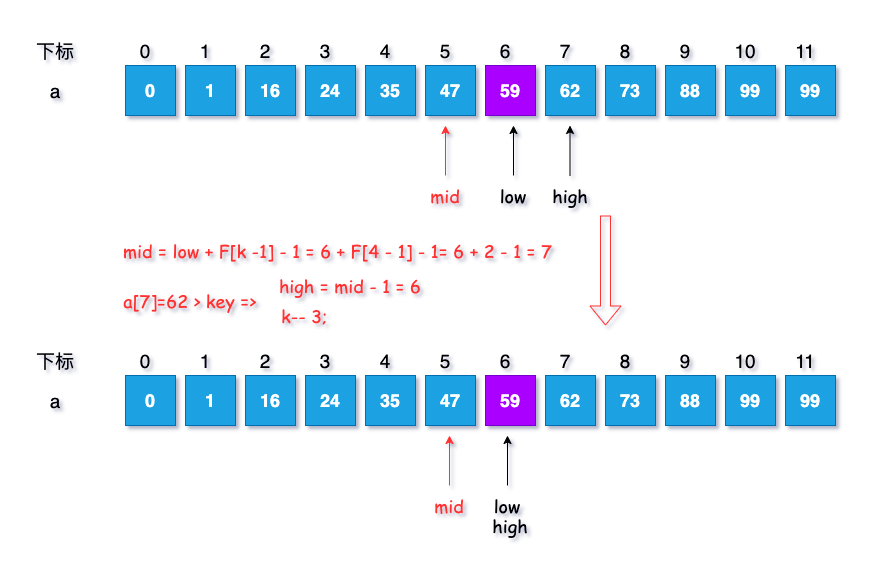
此时各项参数结果为:$k = 3, low = 6, mid = 5, high = 6$
再次循环。
计算当前分隔的下标:$mid = 6 + F[3-1] =1 = 6$
判断 key 与 a[mid] ,此时 a[6] = 59 = key 。说明查找到,进行返回数组下标,返回值为 $6$
if(mid < n)
return mid;
else
return n;
回答为什么补齐$a[n]$
在循环查找的过程中,如果查找的$key=99$,
那么第一次查找时,
- $mid = 8$;
- $low = mid + 1 = 9$
- $k = k - 2 = 7 - 2 = 5$
第二次循环时,此时改变分隔mid 下标的值,$mid =low + F[k - 1] - 1 = 9 + 3 - 1 = 11$, 而此时a[mid] 为a[11] ,数组a 中的11位时没有值,会导致下一步与 key 的比较失败,为了避免情况发生,对上文中将不满的数值补全,用
a[i] = a[n]。
2.2.2 算法核心
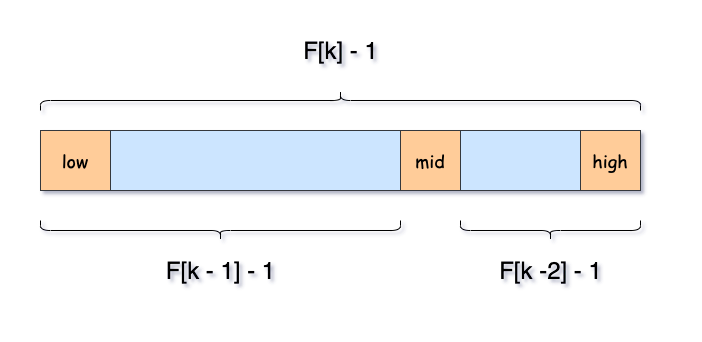
根据上文的查找流程,总结一下算法核心
- 当 $key = a[mid]$ 时,查找成功
- 当 $key < a[mid]$ 时,新范围是第 low 个到第 mid -1 个,此时范围个数为 F[k - 1] - 1 个
- 当 $key > a[mid]$ 时,新范围是第 m+1 个到第 high 个,此时范围个数为 F[k-2] -1 个
示意图如下:
2.2.2 算法实现
先看看代码
int F[100]; |
2.6 查找效率
三种查找方式的公式如下,三种方式各有优劣,适合不同场景:
- 折半查找: $mid = (low + high) / 2$
- 插值查找,适合: $mid = low + \frac{key - a[low]}{a[high] - a[low]} * (high - low)$
- 斐波那契查找: $mid = low + F[k - 1] - 1$
优劣点即使用场景:
- 折半查找:适合数据规模较小,执行效率高
- 插值查找:适合数据规模较大,比折半查找更高效,但规模较小,以数值递增波动较大时与折半查找区别不大;
- 斐波那契:相比插值查找,适合数据递增波动较大的场景。
三、动态查找
3.1 二叉排序树
3.1.1 定义
二叉排序树(Binary Sort Tree),又称为二叉查找树。它是一种空树,或者具有下列性质的二叉树:
- 若它的左子树不空,则右子树上所有结点的值均小于它的根结点的值
- 若它的右子树不空,则左子树上所有结点的值均大于它的根结点的值
- 它的左、右子树分别为二叉排序树
3.1.2 查找
二叉树的结构如下:
typedef struct BitNode{
int data; // 数据域
struct BitNode *lChild, *rChild; // 指针分别指向左、右子树
}BitNode, *BiTree;代码实现如下:
Status SearchBST(BiTree T, int key, BiTree f, BiTree *p)
{
if (!T) {
*p = f;
return FALSE;
}else if( key == T->data){
*p = T;
return SUCCESS;
}else if(key < T->data){
return SearchBST(T->lChild, key, T, p);
}else{
return SearchBST(T->rChild, key, T, p);
}
}分析查找流程:
- 判断树的有效性
- 指针 f 指向 T 结点的双亲,如果第一次,使用值为
NULL - 判断结点数值与 目标值元素结点的数据是否相等
- 结点的值与目标值相等——指针 p 指向元素结点,返回成功
- 如果目标值
key小于元素结点数据,在左子树上,进行查找函数递归 - 如果目标
key大于元素结点数据,在右子树上,进行查找函数递归
示意图如下:
3.1.3 插入
插入的流程有以下几个步骤
- 先查找目标元素,如果存在,无需插入,返回
- 如果不存在,判断 目标值
key与 指针p- 如果大于,则 插入 s 为左孩子
- 如果小于,则插入 s 为右孩子
代码实现如下
Status InsertBST(BiTree *T, int key) |
3.2.4 删除
删除结点有三种情况分析:
- 叶子结点
- 仅有左/右子树的结点
- 左右子树都有结点的
对应的策略如下:
当删除叶子结点:
无需操作,free 即可
当删除仅有左/右子树的结点时:
将它的原子树移动到它的位置,替代他即可
当删除结点左右子树都有结点时:
- 找到待删结点的前缀
- 重接q 的右子树
- 重接q 的左子树
代码实现如下:
Status DeleteBST(BiTree *p) |
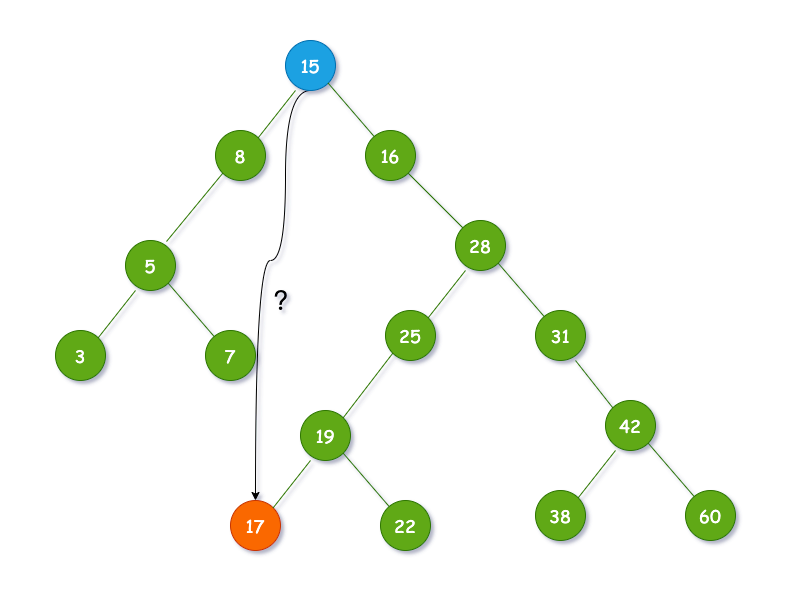
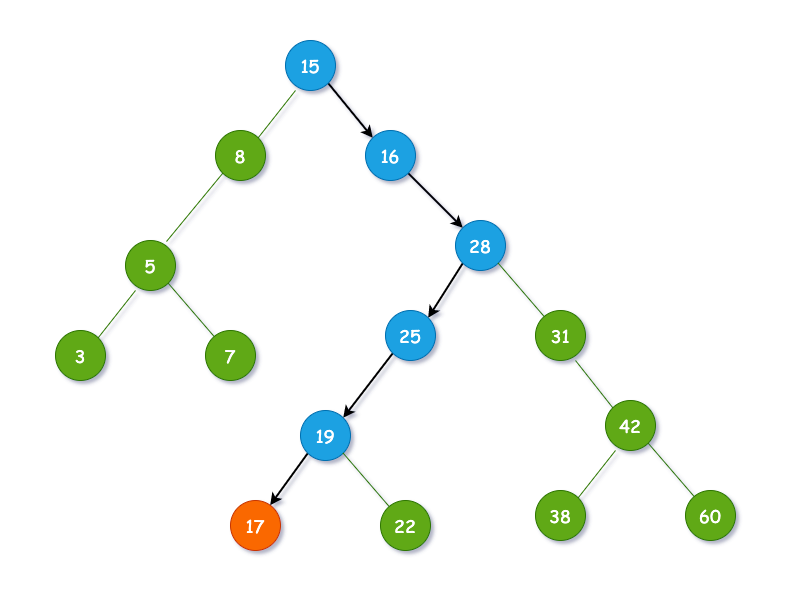
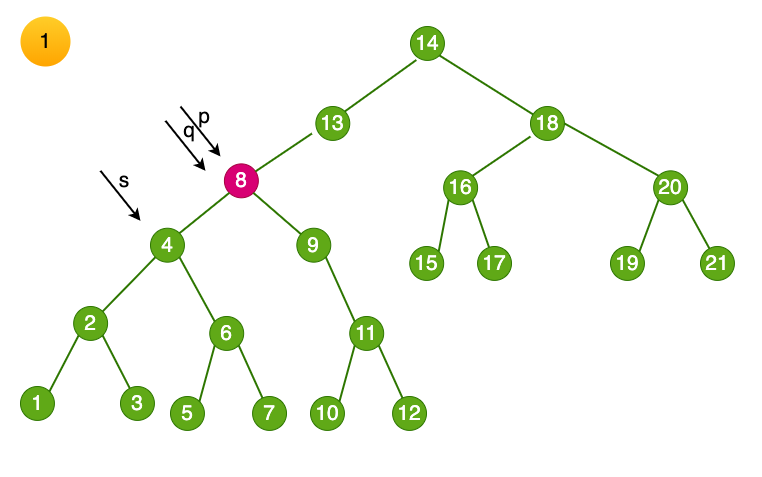
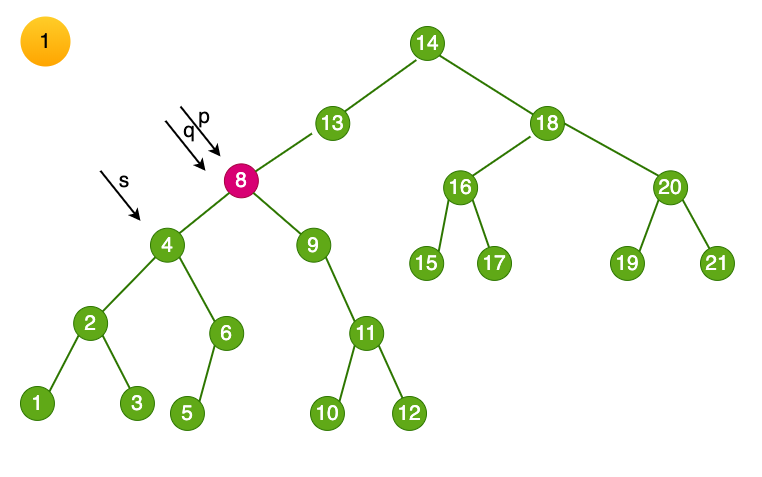
示意图如下:
- 找到目标结点 $8$,标记为 p
- 将p 赋值给临时变量 q,再将其左子树赋值给临时变量 s
- 循环找到左子树的右结点,知道右侧尽头,得到结点$7$,将临时变量
s指向该结点
- 将删除结点的数值赋值为 临时变量 s-> data,即
p->data = s->data。
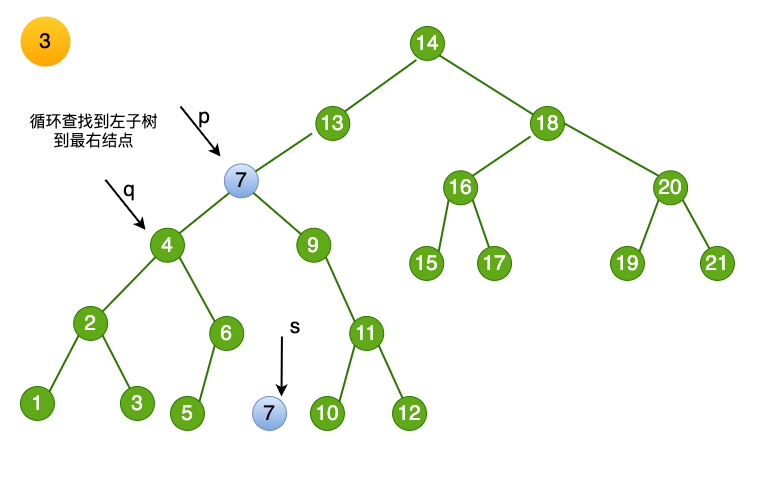
- 最后一步,将目标结点7 进行释放,至此,删除完成。
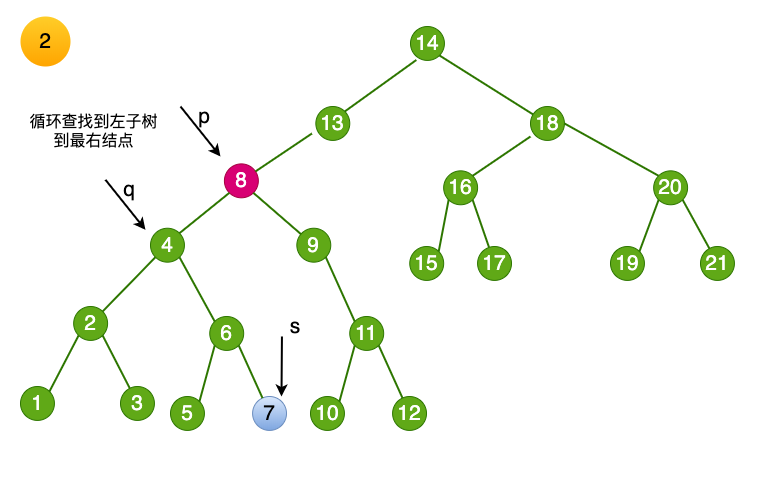
上述情况时最右侧结点为叶子结点,还有一种情况最右侧结点右子结点,该如何处理呢。
- 这里的步骤和上文一样,赋值临时变量p,s
- 找到目标结点6,将临时变量s 指向6
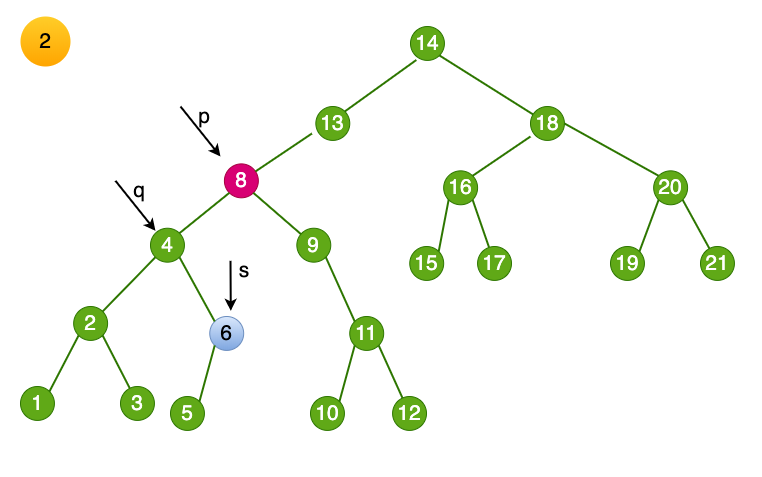
- 将删除结点的数值赋值为 临时变量 s-> data,即
p->data = s->data。此时相当于结点6 被删除,它的子结点需要妥善处理。
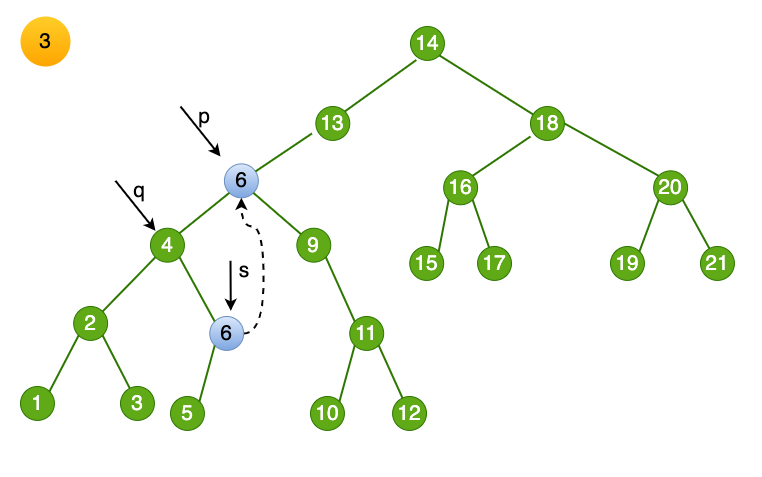
此时如果 p 和 q 指向不相同,则将 6 的子树交给 它的父结点。
即
q->rChild = s->lChild。这样节点6 留下的左结点被链接进入树了。
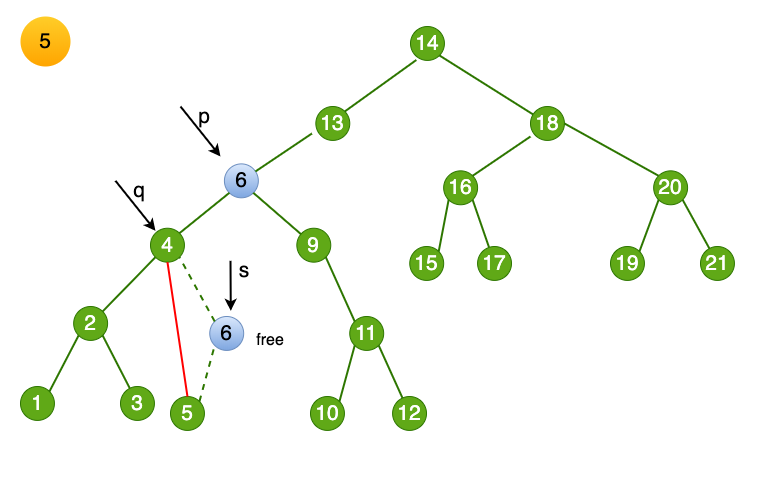
最后一步,free 掉删除的目标结点
3.2.5 总结
二叉排序树是以连接的方式存储,保持了链式存储结构在执行插入和删除操作时不用移动元素的优点,只要找到合适的插入和删除位置后,仅需修改链接指针即可。



